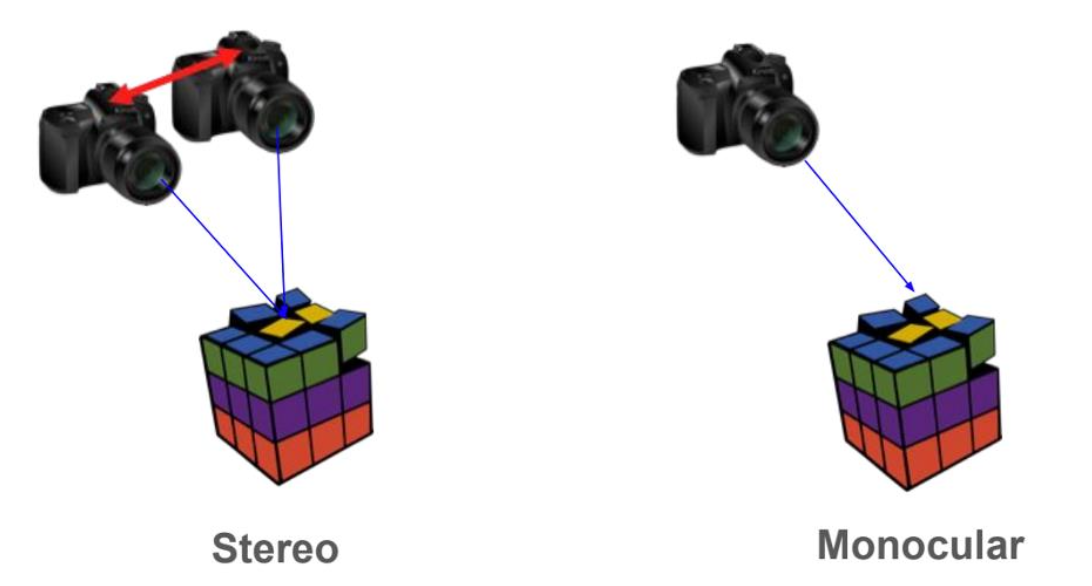
深度估计与三维重建 未完成 深度感知 Depth Sensing¶ 主动深度感知 Active Depth Sensing¶ Depth is perceived by perturbing the sensed environment 主动发射信号来感知深度信息,如: LiDAR Structured Light Active stereo 被动深度感知 Passive Depth Sensing¶ 立体匹配 Stereo Matching¶ 人工智能 计算机视觉