线性代数与图像信息
线性代数 Linear Algebra¶
线性变换的几何意义¶
- Scale (缩放)
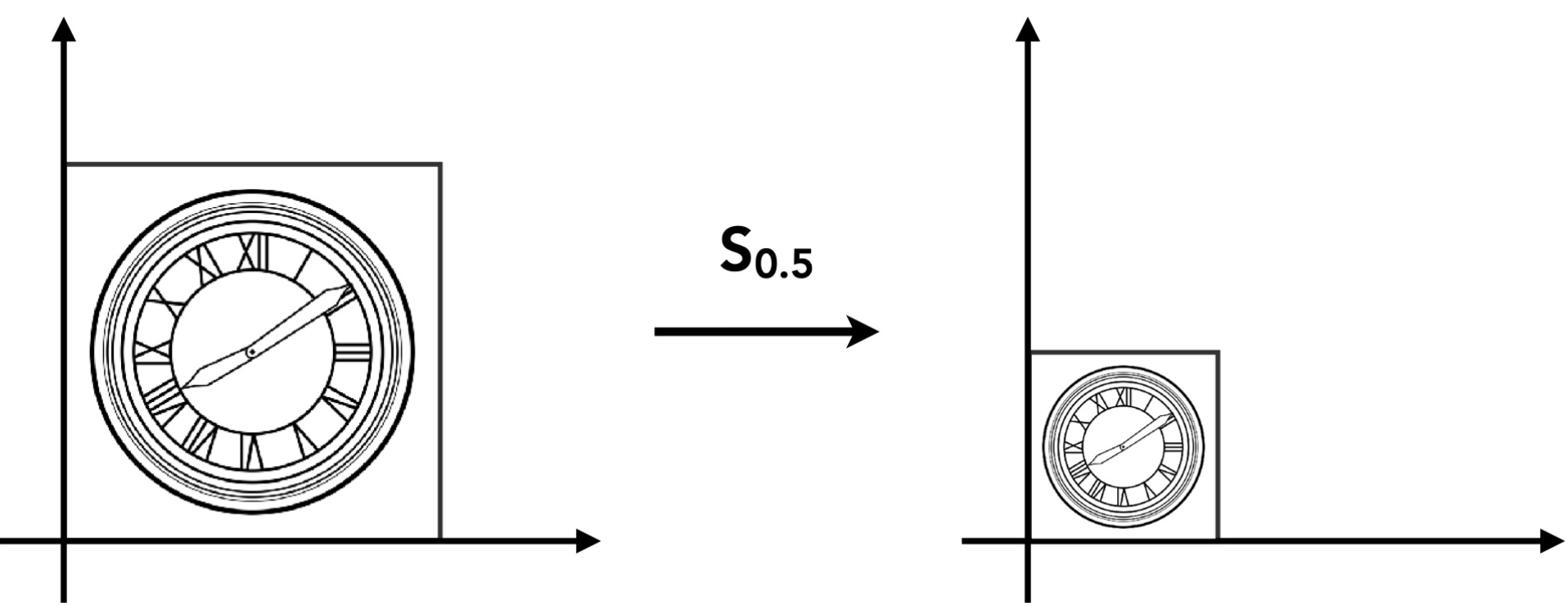
对于图中的变换,有:
写为矩阵形式:
- Reflection (镜像)
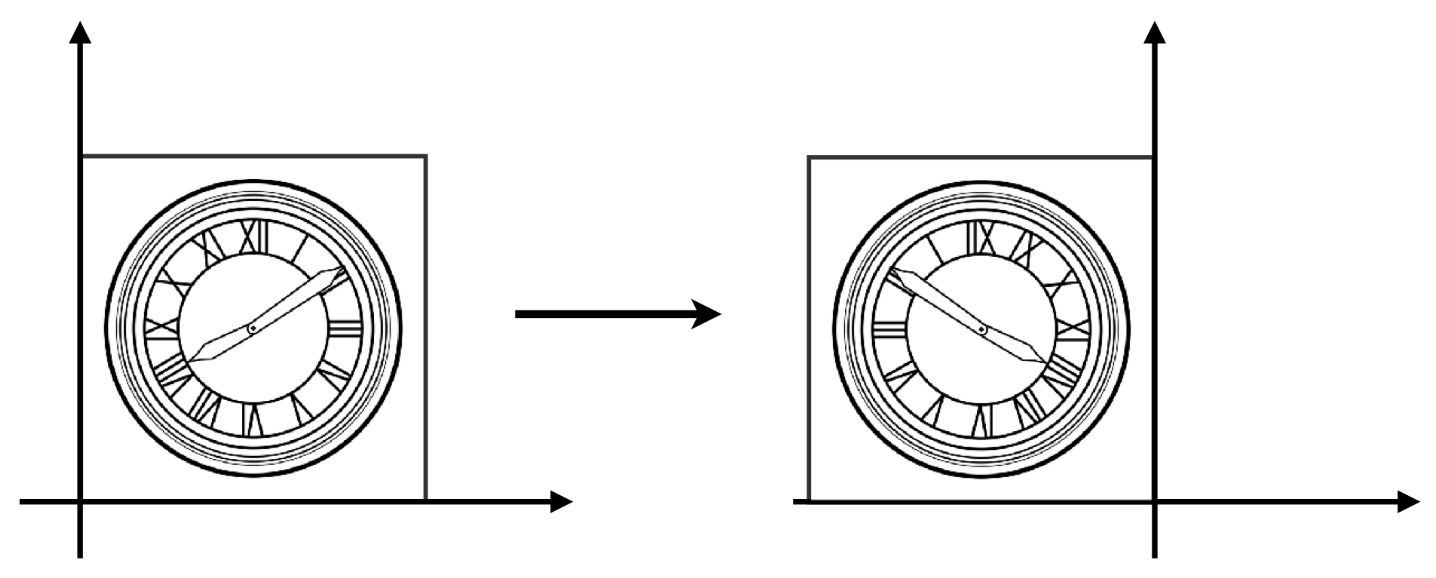
对于水平镜像:
转换为矩阵形式:
- Shear (剪切)
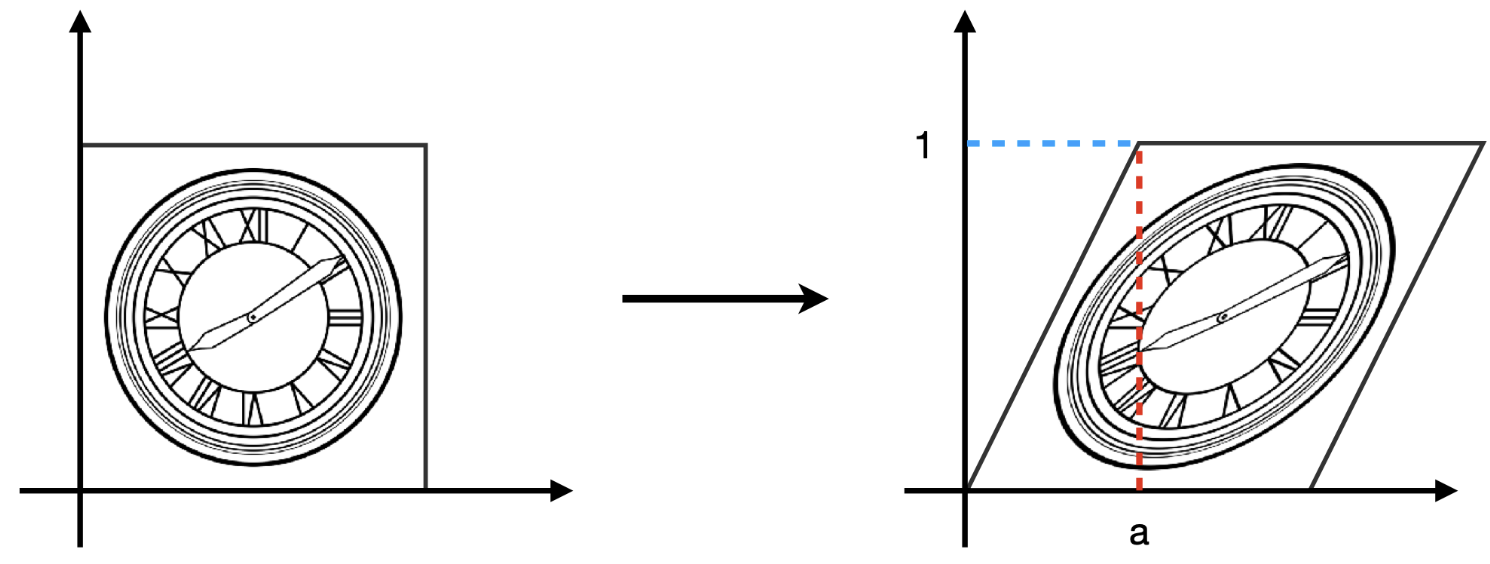
矩阵表示:
- Rotation (旋转)
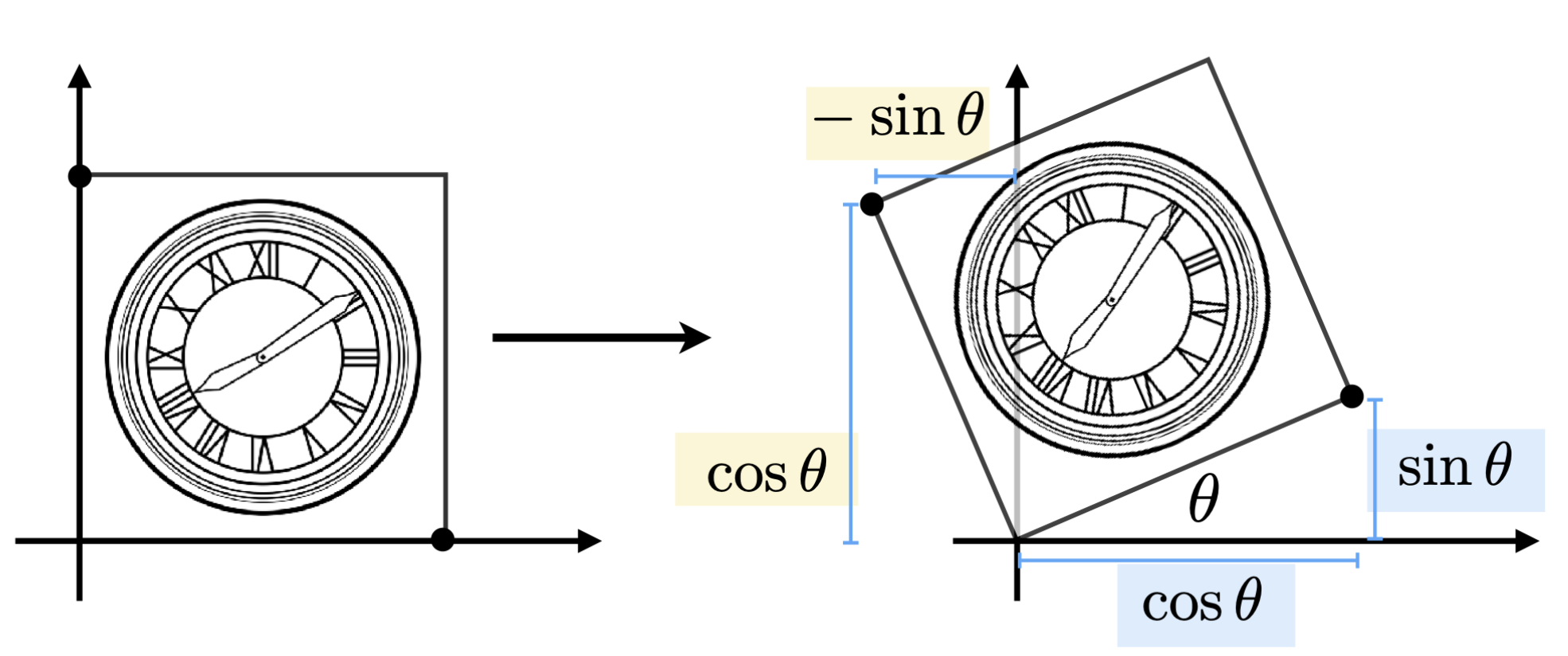
这一变换的矩阵表示为:
上述矩阵中的每一列可以看作原空间的基变换后的结果
即变换后的基为:\((\cos \theta, \sin \theta), (-\sin \theta, \cos \theta)\)
仿射变换 Affine Transformation¶
仿射变换 = 线性变换 + 平移
矩阵表示:
笛卡尔坐标系下的仿射变换可以转化为齐次坐标系下的线性变换
矩阵表达如下:
Info
关于齐次坐标的内容请参考下文齐次坐标
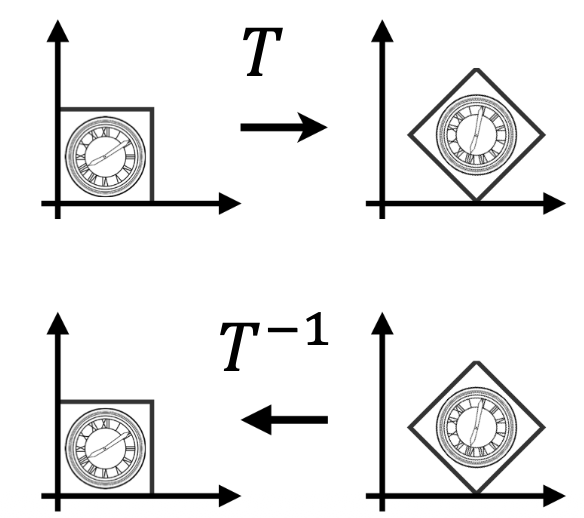
逆变换 Inverse Transform¶
从矩阵角度和几何角度来看,\(T^{-1}\) 是 \(T\) 的逆变换
图像信息 Image Information¶
图像是三维空间的信息在二维空间的映射
相机和镜头 Camera and Lens¶
成像 Image Formation¶
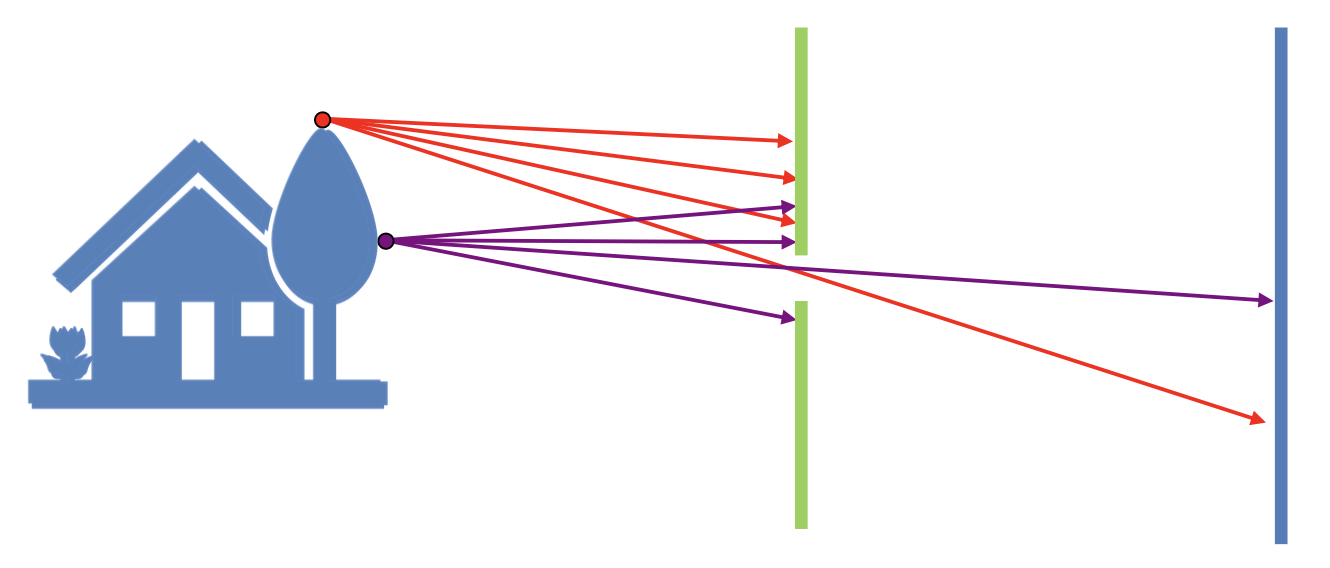
直接将底片放在物体前无法形成清晰的像,因为此时底片上的一个点会接收到空间中多个点发出的光线,一般来说,只有当图像中的点与物理空间中的点是一一对应的,我们认为这个图像是清晰的
由此,我们引入了 Pinhole Camera Model
小孔相机 Pinhole Camera¶
其中的隔板可以遮挡大部分光线,中间的小孔叫做光圈 (aperture)
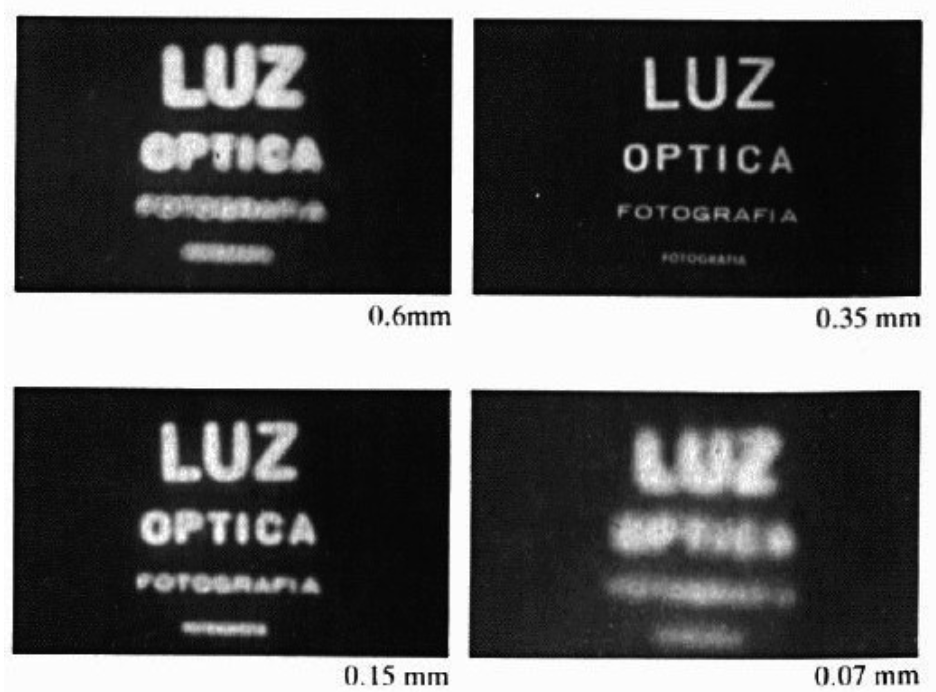
在一定的范围内缩小光圈,可以使图像更清晰,但光圈过小时,会对图像的清晰度产生负面影响,原因为:
-
进光量减小
-
光的衍射
为了解决小孔相机对进光量的影响,我们引入了透镜
镜头 Lens¶
凸透镜有着和小孔一样的投影效果,但透镜能够聚集光线
高斯公式¶
i 表示像距,o 表示物距,f 表示焦距
Info
包括物理变焦和数码变焦:
-
物理变焦:
镜头组通过调整透镜来实现改变整体焦距的效果;或直接切换不同的镜头
-
数码变焦:
镜头的物理焦距没有发生变化,仅仅是通过软件算法实现图像放大
图像放大率 Image Magnification¶
根据高斯公式,当 \(o\) 远大于 \(i\) 时 (生活中的大部分情况),\(f \approx i\),因此焦距越大,图像的放大率越大
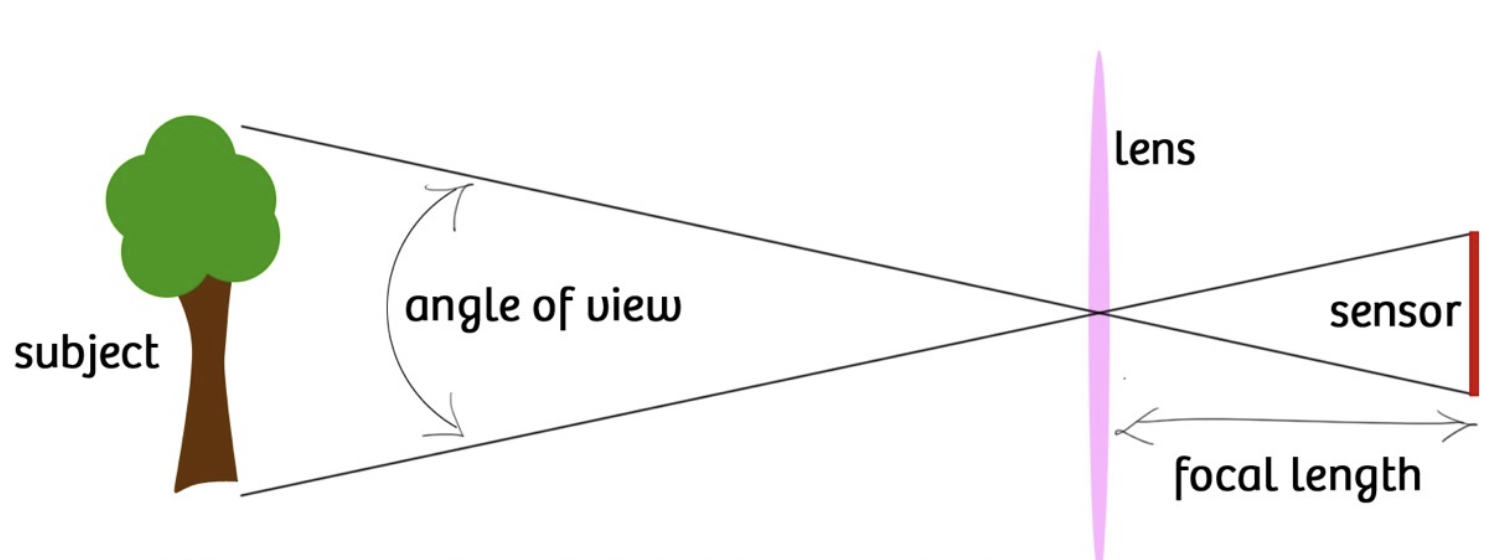
视场角 Field of View¶
在光学仪器中,以光学仪器的镜头为顶点,以被测目标的物像可通过镜头的最大范围的两条边缘构成的夹角,称为视场角
影响因素:
-
焦距 (focal length)
焦距越长,放大率越大,视场角越小
焦距越短,放大率越小,视场角越大
-
传感器大小 (sensor size)
传感器越大,视场角越大
因此,图像的视野取决于传感器大小和焦距的比例
Info
根据传感器的大小归一化后的焦距
光圈 Aperture¶
镜头的通光区域,通过调整光圈的大小来调整进光量,用镜头的直径来表示,记为D
Info
进光量不仅可以通过调整光圈大小来控制,也可以通过调整快门时间来控制
F-Number¶
F 数可以通过如下公式计算:
镜头失焦 Lens Defocus¶
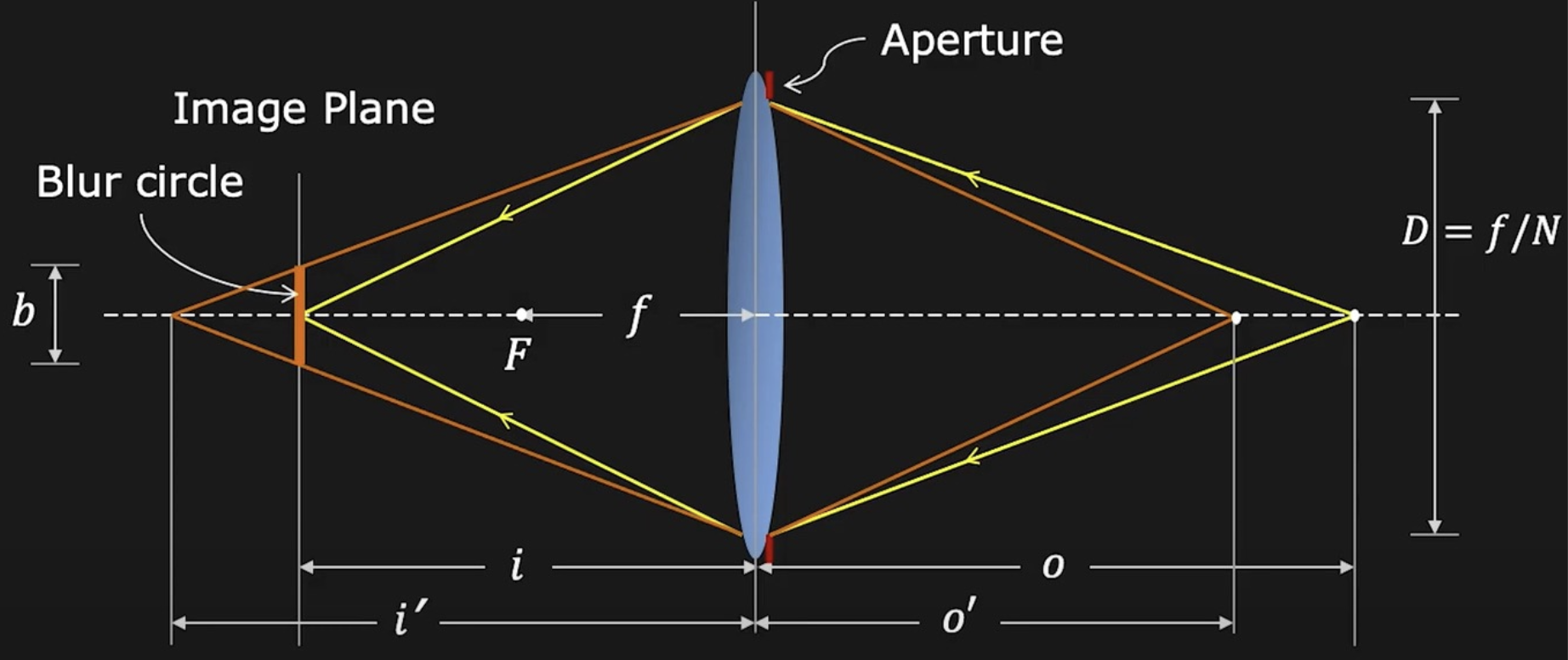
根据相似三角形,有:
因此光斑的大小可表示为:
因此,减小光圈可以减小失焦形成的光斑大小
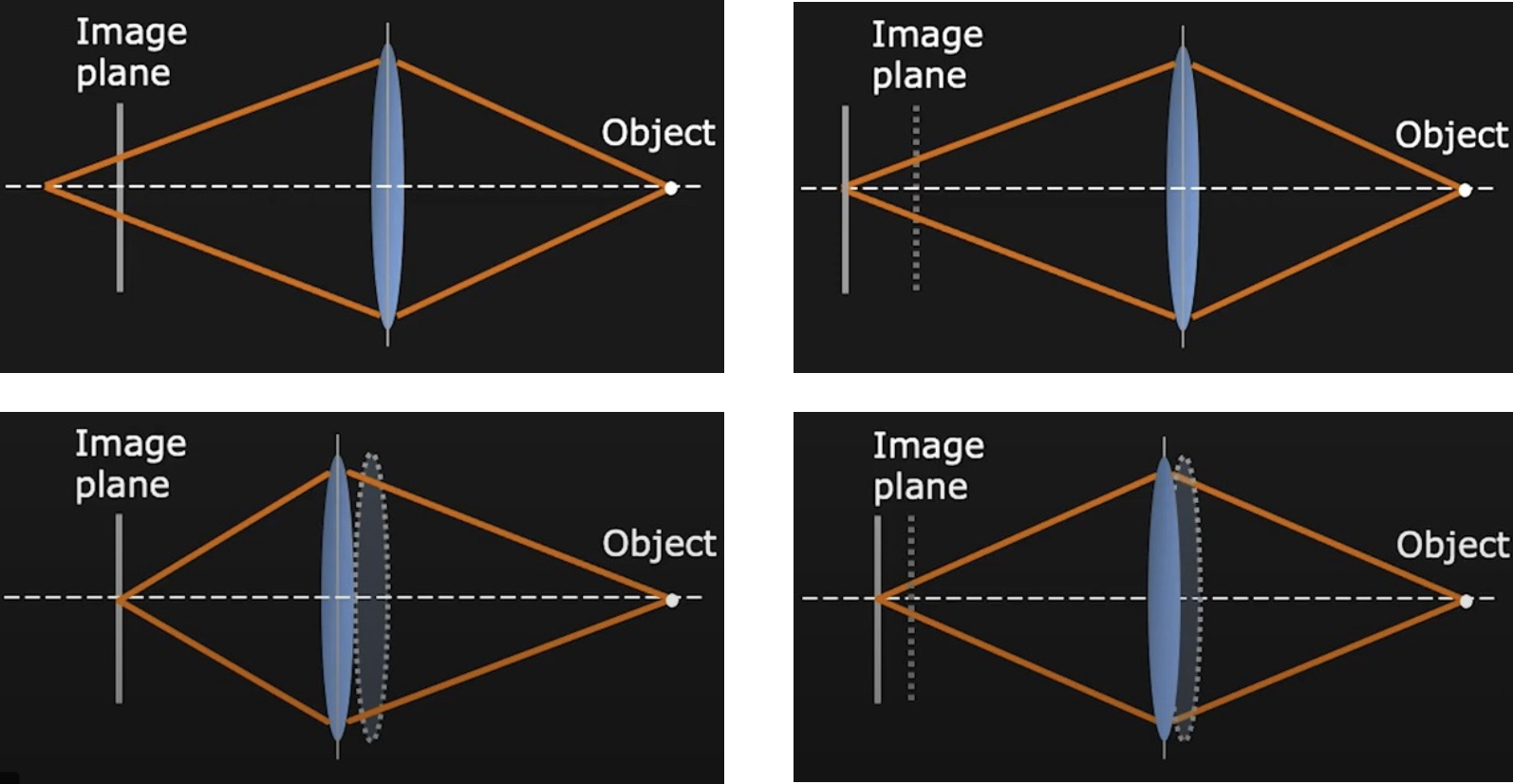
调焦 Focusing¶
在镜头和底片的位置确定的情况下 (\(f\) 和 \(i\) 确定时),只有在同一垂直平面的物体成像是清楚的,因此,我们需要调焦
调焦的方法包括:调整像平面(image plane)和调整镜头的位置
景深 Depth of Field¶
由于传感器的分辨率有限,在实际使用中,未必需要将像精准地聚焦到传感器上,只要光斑的直径b小于像素点的大小,就可以得到较为清晰的像
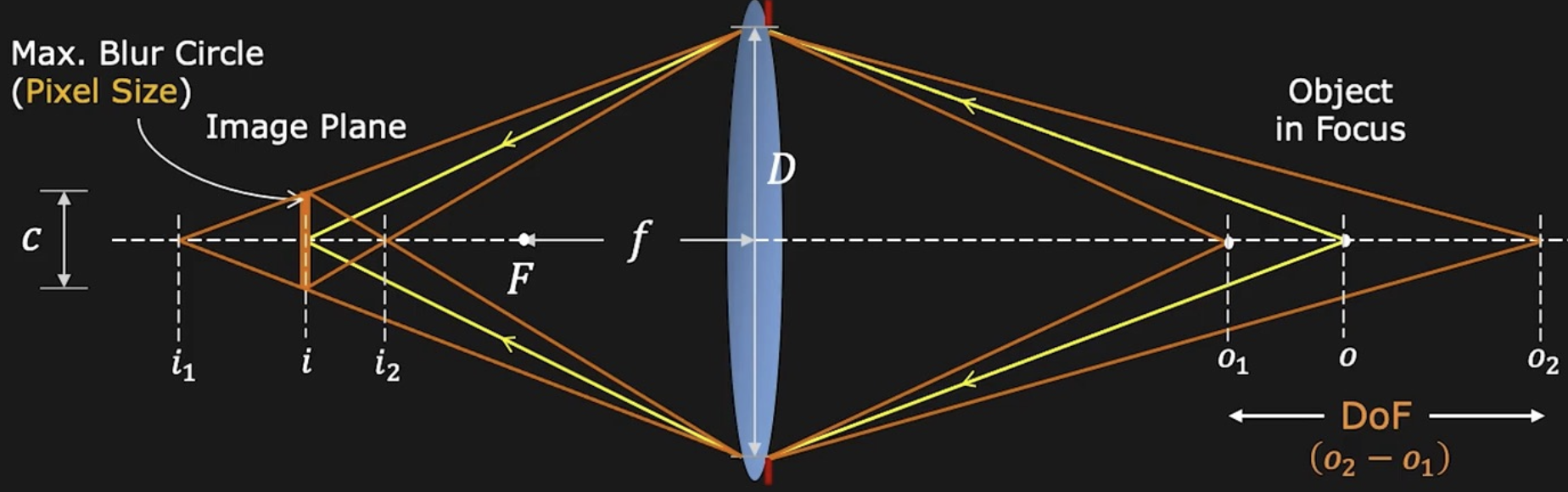
景深与焦距成反比,因此在拍摄人像时,可以选择更大的焦距,更容易地获得背景虚化的效果
可以通过如下方式来获得背景虚化的效果:
-
Large aperture 更大的光圈
-
Long focal length 更大的焦距
-
Near foreground 更近的前景
-
Far background 更远的背景
info 景深公式 (无需记忆) $$ \begin{align} c &= \frac{f^2(o - o_1)}{No_1(o - f)} \ c &= \frac{f^2(o_2 - o)}{No_2(o - f)} \ o_{2} - o_{1} &= \frac{2of^{2}cN(o - f)}{f^{4} - c{2}N \end{align} $$}(o - f)^{2}
几何成像 Geometric image formation¶
3D 到 2D 空间的投影/几何变换
齐次坐标 Homogeneous coordinates¶
!!! info Pin-hole camera model: Perspective Projection
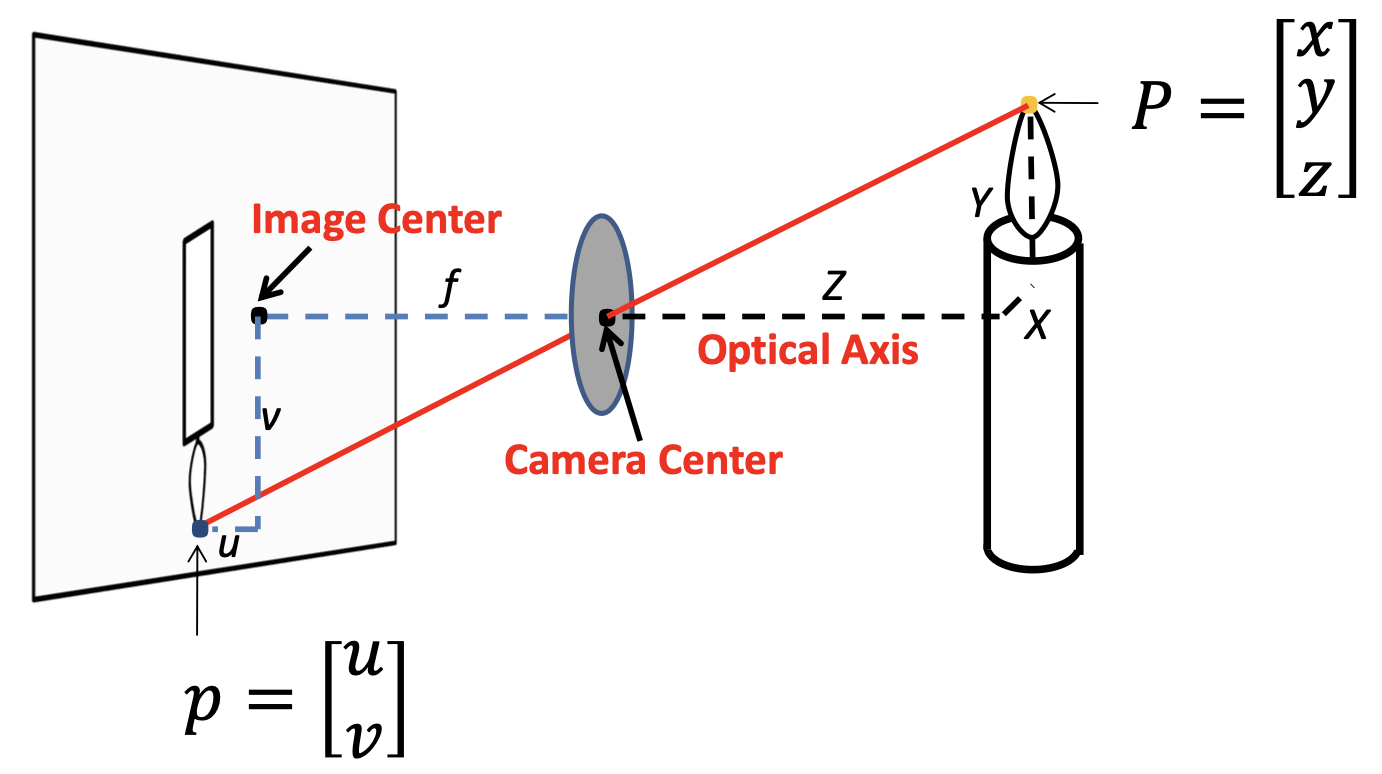
其中对坐标系的定义为:
三维空间中:镜头的中心位坐标系的原点,水平方向为 \(x\) 轴,竖直方向为 \(y\) 轴,平行于光轴的方向为 \(z\) 轴
二维图像:图像中心 (光轴与像平面的交点) 为原点,水平方向为 \(u\) 轴,竖直方向为 \(v\) 轴
此处应用像距约等于焦距,从而有 \(o \approx f\) (图片中 \(f\) 的来源)
图中 \(z\) 表示深度
由相似可以得到
可以看出,在笛卡尔坐标系中,这种投影变换不是线性的
由此引入齐次坐标,将这种投影运算转变为线性运算
笛卡尔坐标转化为齐次坐标
齐次坐标转化为笛卡尔坐标
Warning
齐次坐标是缩放不变的
一个齐次坐标可能对应多个笛卡尔坐标,但它们只有长度上的缩放关系
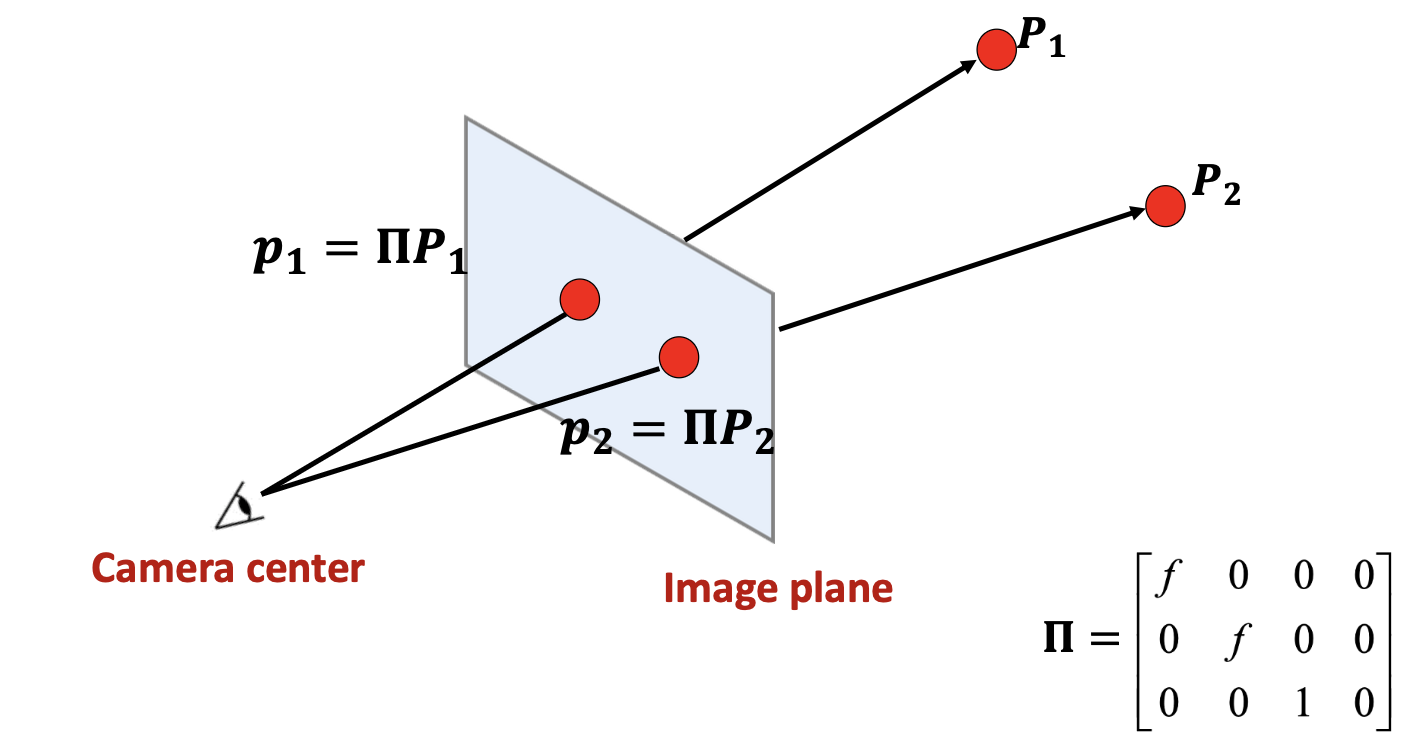
齐次坐标中的透视投影¶
在齐次坐标系中,透视投影可通过线形运算表示,公式如下:
透视投影公式
上述公式中:\(\begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}\) 表示物体在齐次坐标系下的坐标,\(\begin{bmatrix} fx \\ fy \\ z \end{bmatrix}\) 表示像在齐次坐标系下的坐标,\(\begin{bmatrix} f \frac{x}{z} \\ f \frac{y}{z} \\ 1 \end{bmatrix}\) 表示像在笛卡尔坐标系下的坐标
透视投影可视化¶
可以将像平面等效翻转到镜头前
透视投影 Perspective Projection¶
信息损失¶
经过透视投影后,由于物体相对于相机的深度信息损失,导致成像中长度、角度等信息会损失,但线的曲直(直线仍然是直的)等信息仍然得到保留
灭点 Vanishing Point¶
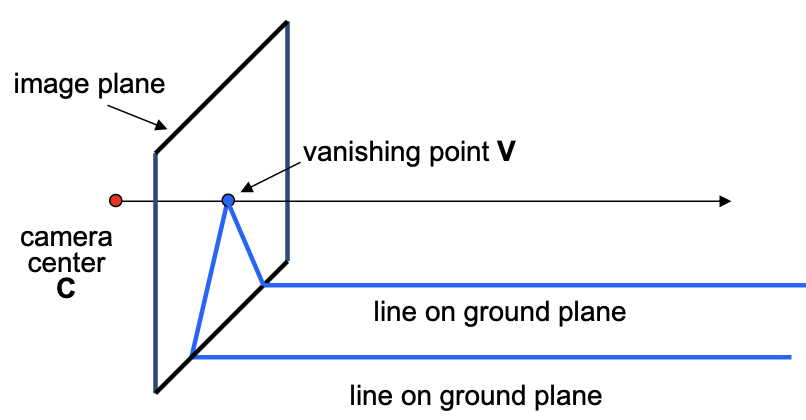
空间直线与成像平面不平行时,该直线在成像平面上的投影为收敛于灭点的线段
若空间直线垂直于成像平面,则灭点位于像平面中心
若一组平行线平行于成像平面,则它所成的像依旧平行,即灭点位于无穷远处
由此可以获得空间中的线相对于相机的位置
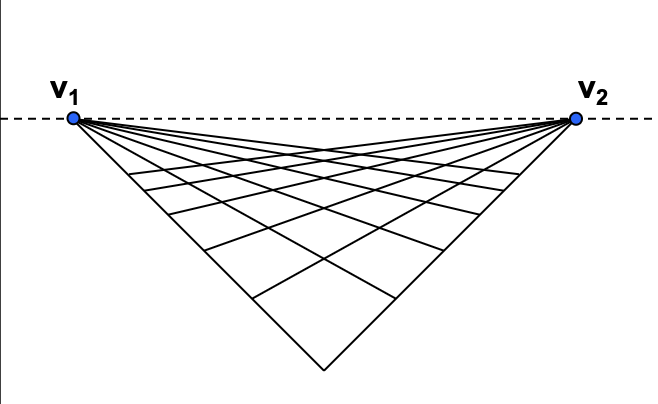
性质:
-
两条平行线有相同的灭点
v -
相机中心与灭点连成的直线平行于原直线
-
灭点可能在画面外或无限远处
灭线 Vanishing Line¶
空间平面与成像平面不平行时,该平面在成像平面上的投影为收敛于灭线的区域,相互平行的空间平面在成像空间收敛于同一条灭线
垂直于成像平面的平面对应的灭线在画面中央
灭线与镜头中心所成的平面平行于该平面
该平面中所有直线的灭点都在这条灭线上
同理于灭点,通过灭线可以获得空间中的平面相对于相机的位置
透视畸变 Perspective Distortion¶
由透视投影的性质引起,与镜头无关
带来的现象有:
- converging verticals
Details

楼梯形变为梯形,平行线在图像中可相交
- 球体形变为椭圆
球心与镜头中心的连线不垂直于成像平面,且越偏离垂直状态,形变为椭圆的程度越严重
(球面上的各点与镜头中心的连线形成锥形结构,以不垂直于轴线方向切割该锥形,从而得到椭圆)
Details

径向畸变 Radial Distortion¶
径向畸变主要由镜头的缺陷引起,光线通过镜头边缘的成像更加明显
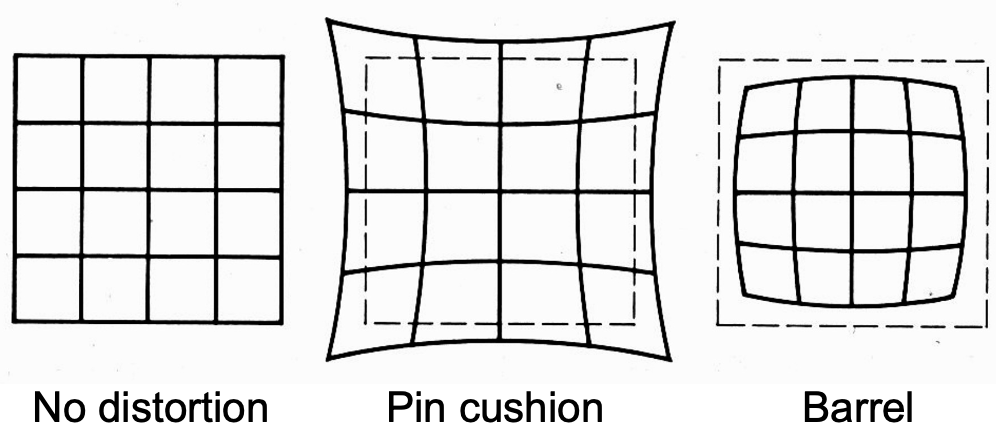
分为:
-
枕形畸变 Pin cushion
-
桶形畸变 Barrel
短焦 (广角)镜头更容易发生桶形畸变,长焦镜头更容易发生枕形畸变
由于发生了径向畸变,最终成像点的位置不完全符合透视投影中投影点的位置
\({x^{'}_n}\) 和 \({y^{'}_n}\) 是透视投影中投影点的位置,\(x^{'}_d\) 和 \(y^{'}_d\) 是发生径向畸变后投影点的位置
正交投影 Orthographic Projection¶
正交投影可以视为透视投影的特殊情况,当投影中心 (COP) 到投影 (PP) 平面的距离无穷大时,透视投影退化为正交投影
正交投影并没有近大远小的效果
正交投影公式:
光度成像 Photometric Image Formation¶
描述了三维世界物理性质和二维图像的颜色之间的关系
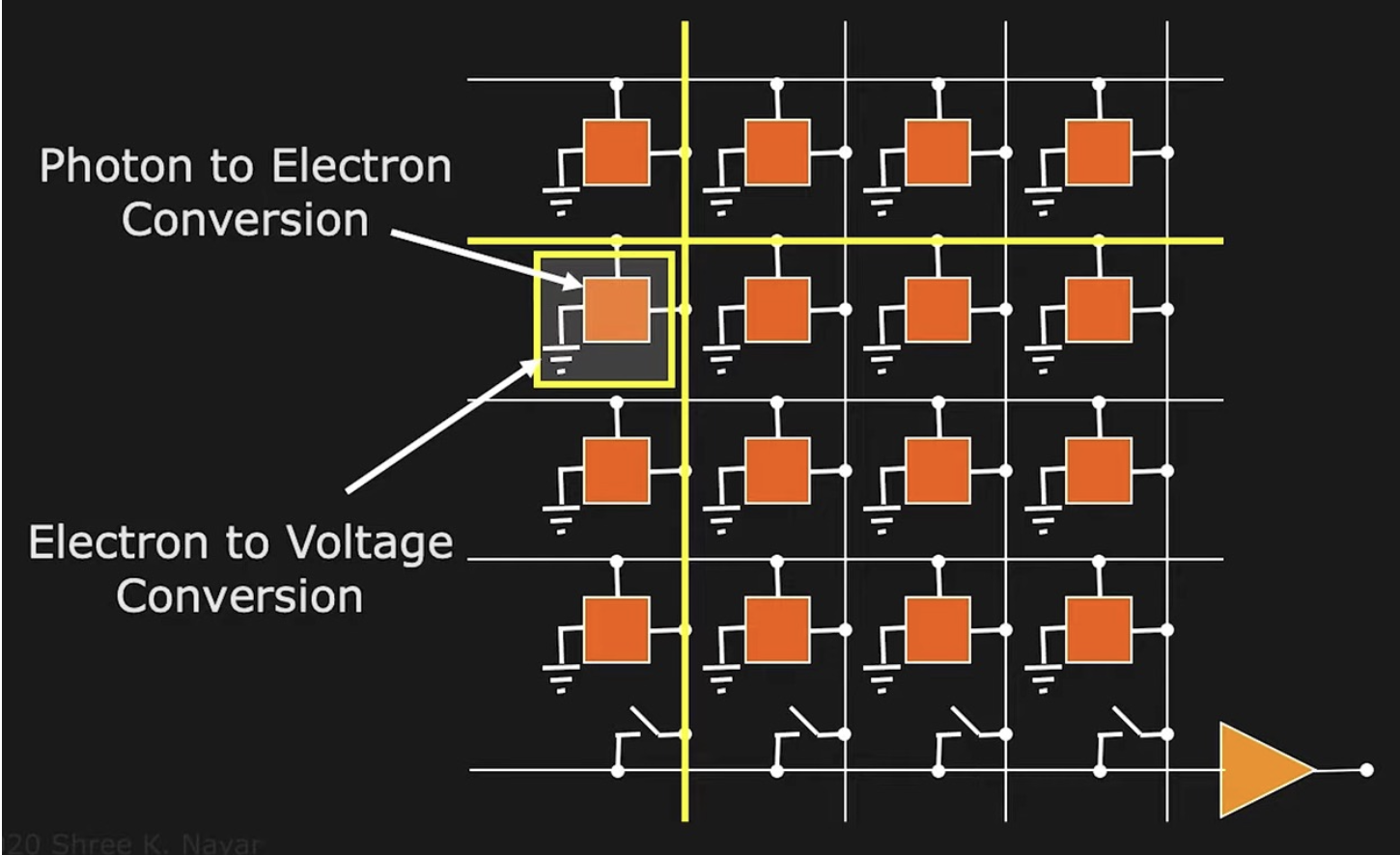
图像传感器¶
CMOS:光子 -> 电子 -> 电压
快门 Shutter¶
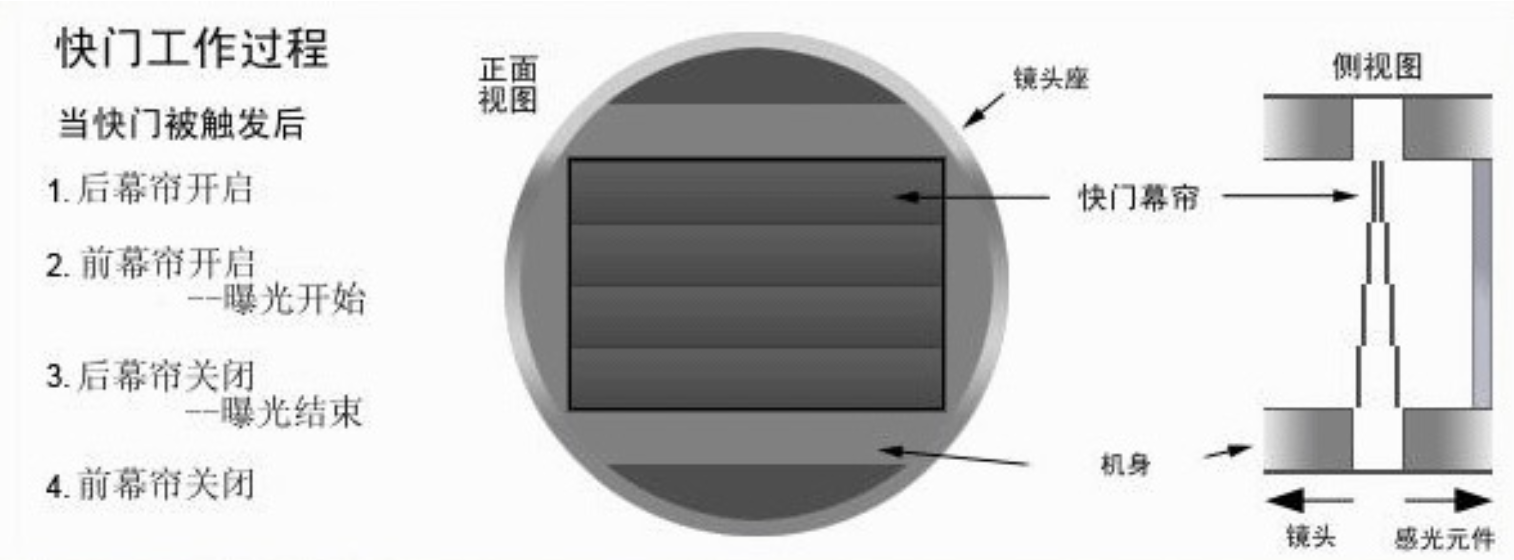
快门速度 Shutter speed¶
快门速度可以控制曝光时间,快门时间过短会导致成像过暗,快门时间过长易导致画面模糊 (相机或物体发生移动)
果冻效应 Rolling shutter effect¶
快门分为全局快门 (Global shutter) 和 卷帘快门 (Rolling shutter)
对于全局快门,整个传感器同时曝光;而卷帘快门的传感器使用逐行曝光
若卷帘快门进行曝光时,物体快速移动,就可能导致图像中的物体变形,发生果冻效应
色彩空间 Color space¶
物理世界中,我们使用波长来描述不同颜色的光
在计算机中,我们使用不同的色彩空间对颜色进行描述
-
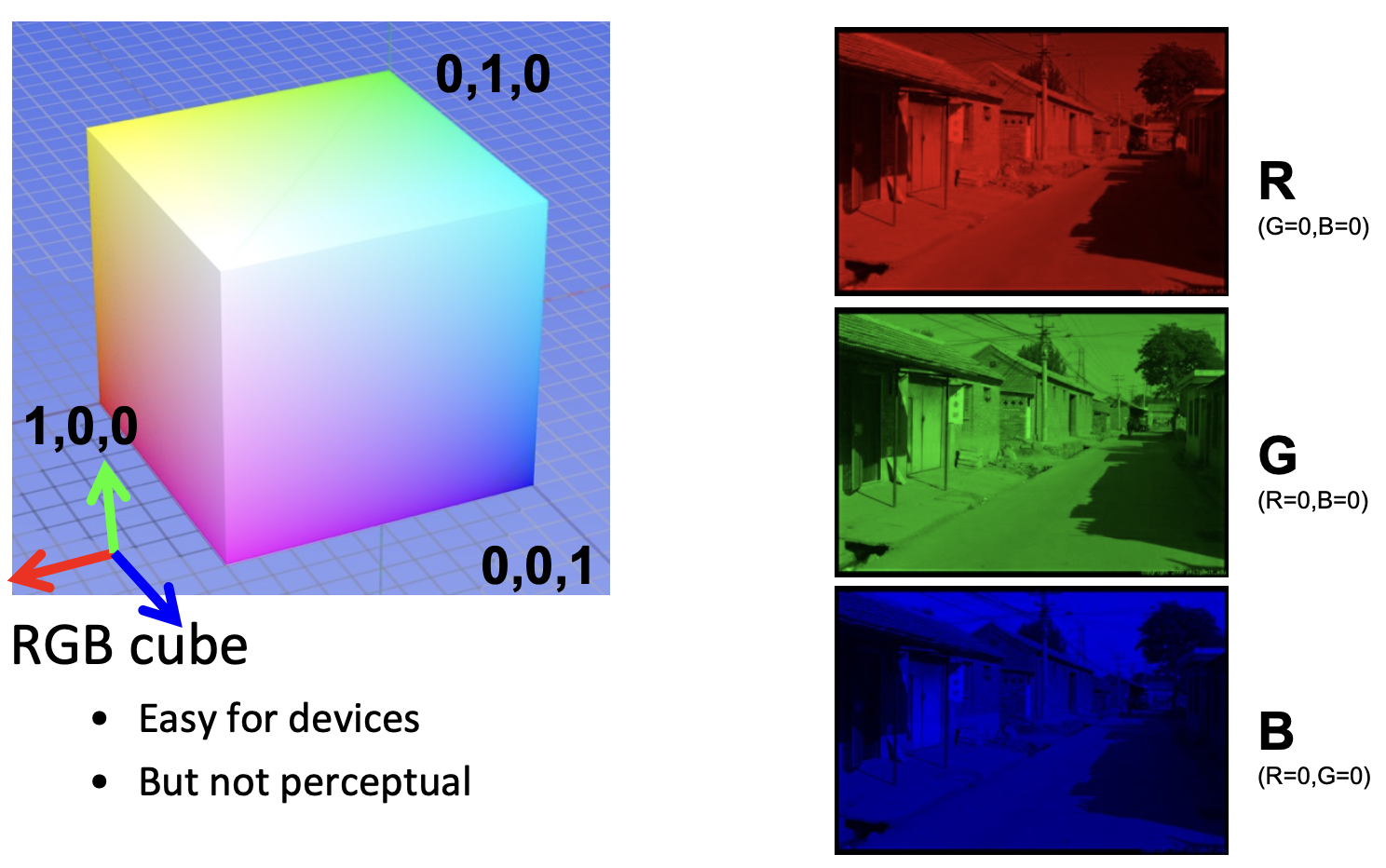
RGB 色彩空间
红、绿、蓝三种颜色,每个颜色通过 0~255 8bit 的数据进行表示
-
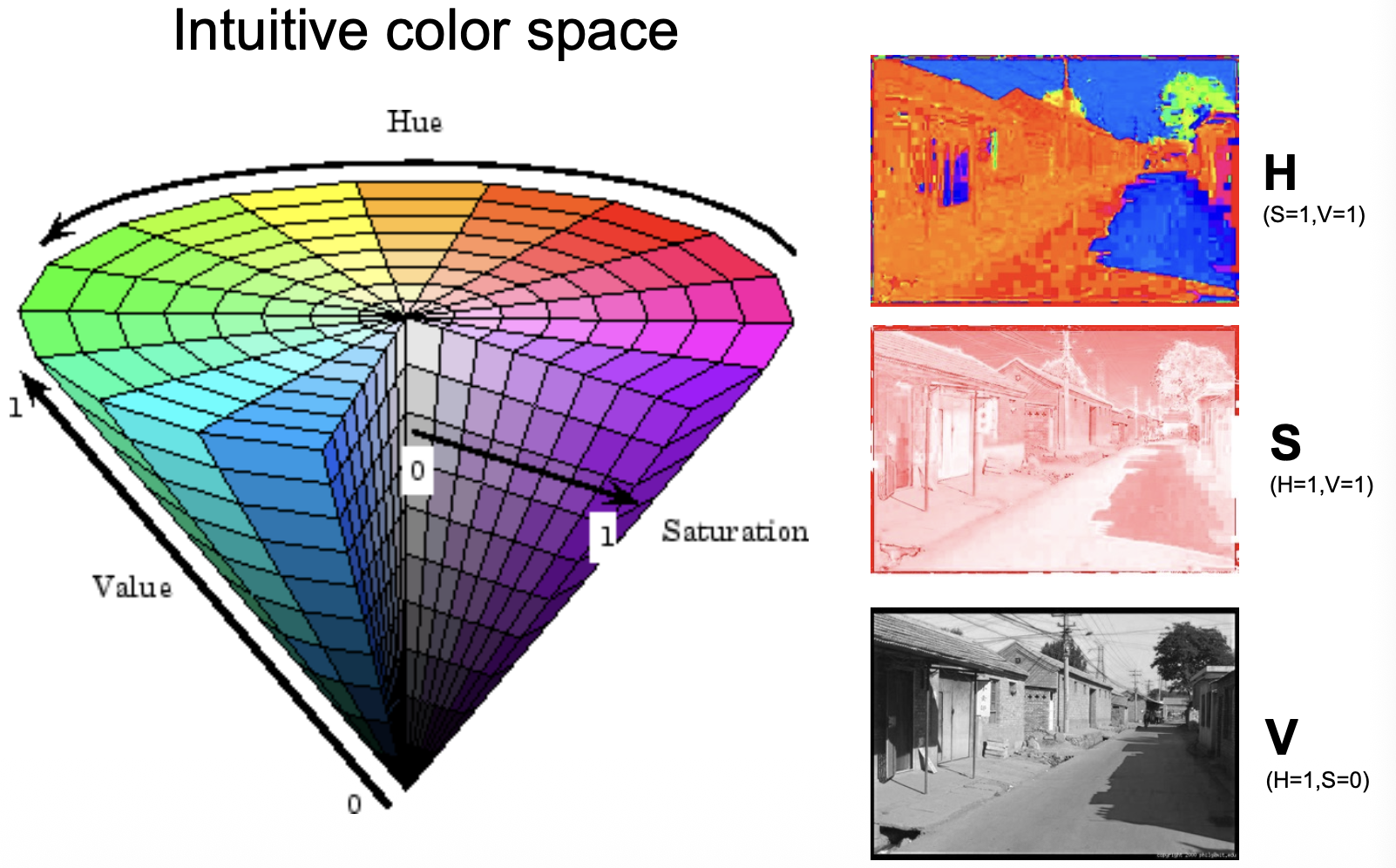
HSV 色彩空间
-
H: Hue 色相 通过角度表示颜色的种类
-
S: Saturation 饱和度 颜色的纯度
-
V: Value 亮度 表示颜色的明暗程度
HSV 色彩空间和 RGB 色彩空间可以相互转换
图片的颜色数据在 python 中以三维矩阵的形式存在 (Height, Width, Channel)
颜色感知 Color Sense¶
使用拜耳滤镜 (Bayer filter) 来在单个芯片上记录光的颜色
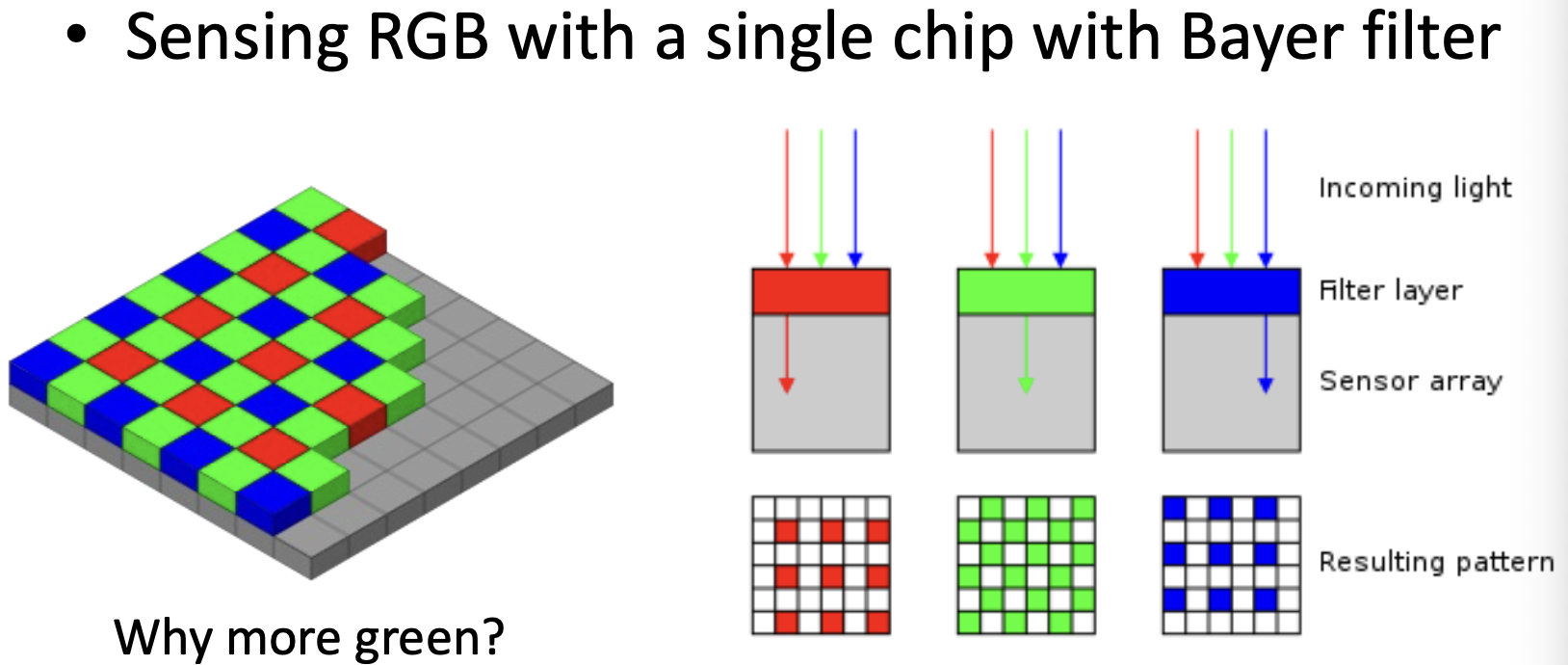
单个芯片智能记录一种颜色的光
四个芯片排列的方形结构记录一个完整的 RGB,绿色滤镜数量更多(人眼对绿色更加敏感)
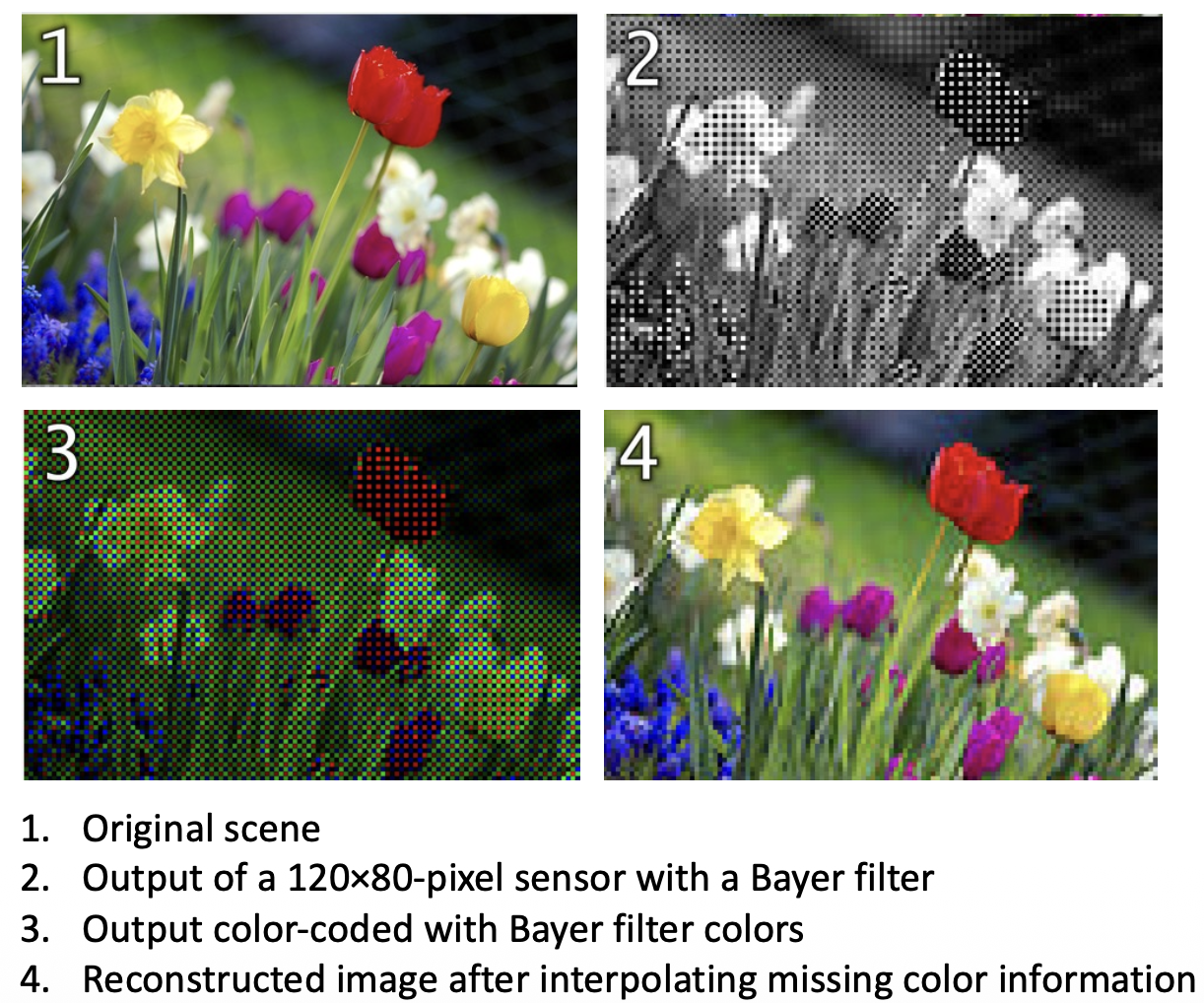
由于四个芯片才能记录一个完整 RGB,会导致得到图像不连续,需要借助图片差值进行复原
着色¶
计算机图形学知识,简要了解即可
物体的颜色由物体物体表面反射/折射的光线决定,而这又与物体的材质相关
数学中通过 BDRF 描述物体的材质
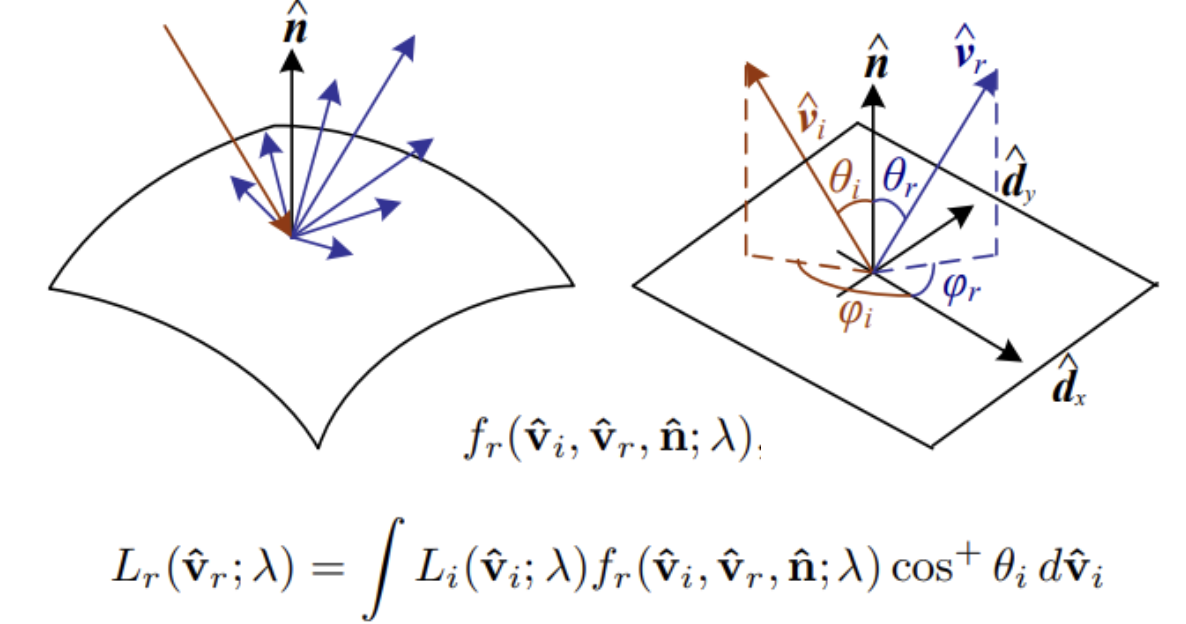
上式中 \(\hat{v}_i\) 表示入射光线的方向,\(\hat{v}_r\) 表示反射光线的方向,\(\hat{n}\) 表示表面法向量的方向,\(\lambda\) 表示光线的波长,等式左端的结果 \(L_r(\hat{v}_r;\lambda)\) 表示以 \(\hat{v}_r\) 方向射出的,波长为 \(\lambda\) 的光线的强度